
ロボットが歩んできた歴史や現在ロボット研究に携わる専門家の意見を交えつつ、これからのロボットの在り方を探る連載「WHO,ROBOT」。第3回のテーマは「ヒト型ロボット」。数あるロボットの形態の中でなぜヒト型が研究開発されているのかに焦点を当て、ヒト型ロボットの意義を探る。
(取材・村松光太朗)
ロボット研究にワクワクを
前回、ヒト型ロボットは他のロボットに比べて物理的作業が不得手ではないかという話題があがった。実際、工場などで普及している産業用ロボットに、ヒトの全身を再現したようなものは見受けられない。それでは、ヒト型ロボットの研究開発を行う理由が別にあるとしたら、どのようなものか。ヒト型ロボットの研究に30年以上携わる稲葉雅幸教授(情報理工学系研究科)に尋ねた。
ヒト型ロボットの研究開発の意義とは?
いろいろあります。ヒト型ロボットはあくまでも題材であり、題材をどうしていきたいかは研究者それぞれが考えていることです。私が研究者を代表して「ヒト型ロボットの意義や目的はこれです」と宣言することはできません。
理系分野の分類として「基礎的な理学」「応用的な工学」という区分けはよく言われます。それぞれ真理の探究、社会への実装という目標に向かいます。ただ、ヒト型ロボットは社会に役立てるためのものだから工学に属する、と断言することもできません。例えばヒト型ロボットの開発を通してヒトそのものを理解するという試みも考えられ、その場合ロボットは顕微鏡や望遠鏡のように何かを知るための道具であり、研究の意義はヒトの理解という理学的なところにあります。ヒトとは何かという問いは理系に限らないものですが、理学的な関心も恐らくここに属するでしょう。
私自身は工学寄りかと思います。これから話すのは、私にとってのヒト型ロボット研究の意義です。
ヒト型ロボットに関わる以前に行っていた知能ロボットの研究は?
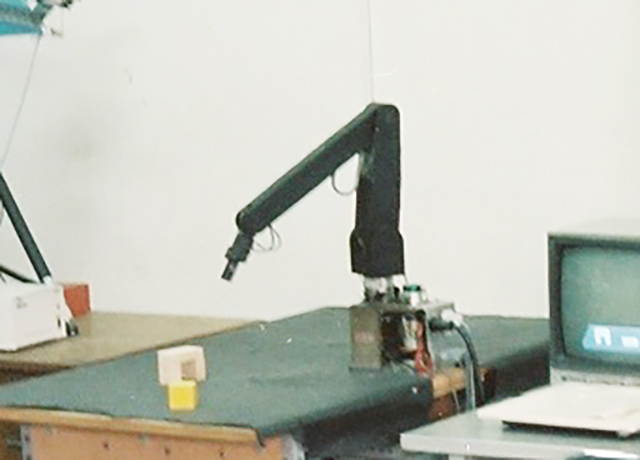
私が東大の学生だった時代に研究対象として注力されていたのはロボットアーム(図1)の形態のものです。そこでは、ヒトのように扱う物体に応じて細かく力を調整することで器用な操作ができるようにするために感覚と動作を連動させる研究が重要なテーマでした。加える力が少し大きいだけで壊れるような繊細な物体を扱うには必須となります。さらに、力の入れ具合を調節する必要がある硬い物を扱うだけでなく、柔軟な物を扱えるようにする技術は当時実現されておらず、どのようにすれば可能となるかが挑戦課題となっていました。そこで、カメラを用いて外界からの視覚的なフィードバックを得られる知能ロボットシステムの構成法と、視覚認識に基づく行動実現法の研究が始まりました。その中で私が修士課程の研究として進めたのは、ロボットアームによるひも結びの実現でした。硬い積木に加えて柔軟物も扱えるロボットが研究対象となりました。
博士課程修了後、教員になって感じた問題は?
大学で研究開発されるロボットが、とても若者の興味を引くようなものではないということでした。既に子ども向けのおもちゃとして、ロボットに変身する新幹線といった商品があった80年代です。それらを見て育った子どもたちが学生として大学に入ったときに、おもちゃのようなものを自分で動かせるというワクワク感のある環境がなければ、大学は若者が喜々として集まってくる場所にならないだろうと考えました。
研究・教育材料としてのヒト型
大学での教育や研究に必要な、プラットフォームとしてのロボットとは?
若い学生が興味深々に何かを思い通りに動かす経験を得られるようにするためには、まず経験の土台となるロボットが必要でした。しかし、アーム型だけでなく車輪移動型や動物型、ヒト型などの形態を持つロボットを自由に選べる環境と、ロボットの知的行動がどう実現可能かを考えて調べるための有用な方法が当時存在しなかったのです。そこで、カメラを持つ小型のロボットと、ロボットを外部のコンピューターに無線でつないで行動を制御できる研究環境を作りました。その結果、2脚2腕のヒト型ロボットも扱うことが可能となりました。

そして90年代後半、技術の高度化とともにコンピューターが小さくなり、ロボットに直接搭載できるほどになりました。この頃、本田技研工業株式会社による発表を契機に、等身大ヒト型ロボットが国のプロジェクトとなり、研究用プラットフォームとして等身大ヒト型ロボットを大学でも使えるようになりました(図2)。ヒト型ロボットは、段差がある環境でも動き回って硬い物や柔軟な物を認識して操作するロボットの実験・研究を行う共通のプラットフォームとなりました。学生たちは実際にヒト型ロボットを用いて、まだ実現できていない課題を知り、各自の研究テーマを考えていくことが可能となったのです。
等身大のヒト型ロボットをプラットフォームとして、どのような研究ができるのか?
ヒト型ロボットの大きな特徴は、ヒトが生活する環境の中でヒトが使ういろいろな道具を使えるという点です。建設機械の操縦席も、台所の調理器具も、病院のベッドも基本的にヒトに適した構造や機能を持っています。このような環境では、産業用ロボットアームのように各道具に特化したロボットを逐一作るより、複数の道具を器用に使いこなせる汎用性の高いロボットを1台作る方が賢明でしょう。ロボットが環境中に占める空間を節約するという意味でも、費用対効果を高めるという意味でも合理的だからです。何より、教えられずとも自ら道具の使い方を学ぶような知能を持つロボットができれば、一つの理想形に到達します。これは私の研究目標の一つであり、これに適したロボットの形態はヒト型だと考えます。
研究室にある既存のヒト型ロボットでは不十分な点もあるか?

もちろんありますし、不十分な点を知ることで新しい研究用ロボットを開発することになります。例えば「ロボットのボディや動きにもっとしなやかさが欲しい」、あるいは「ヒトの筋骨格の複雑さはどのように制御可能なのか」。このような思いから、ヒトの骨格や筋肉配置を模倣したロボット(図3)の開発に学生たちが挑戦しています。題材としての新しいロボットが学生の問題意識を駆り立てる。そして、従来のロボットではできていないことを自身の研究テーマとして考え出し、取り組んでいるのです。学生の挑戦を刺激するのに、ヒト型ロボットは大変良いテーマとなっています。
【連載:WHO, ROBOT】
- ロボットと人の役割分担明確に ~東大教授と迫る「ロボット工学三原則」~
- ロボットのコミュニケーションとビジネス戦略に迫る
- ロボット通じ学生の挑戦促す「ヒト型ロボット」研究開発の意義とは <- 本記事
- 新しい身体が広げる可能性~テレイグジスタンスって?~
- 遠隔化の波は診療を超えて手術まで~ロボット工学と医学の融合~
この記事は2020年1月14日号から転載したものです。本紙では他にもオリジナルの記事を掲載しています。
ニュース:東大の足元は今③学生寮 教育の場としての学生寮を デジタル化時代の大学教育の在り方とは
ニュース:阿部選手10区を駆ける 箱根駅伝 「悔しいが未練ない」
ニュース:教養学部学部交渉 食事環境の整備など6項目を要求
ニュース:理学系・西増准教授が受賞へ 日本学術振興会賞 生研・野村准教授も
ニュース:流体中の微小粒子を安価簡便に自動測定
ニュース:遺伝子発現の制御に茶カテキンが関係
ニュース:七大戦 東大は最下位発進 アイスホッケー欠場響く
企画:国境越えた中国茶の世界 歴史や味わい方をのぞき見
WHO,ROBOT:第3回 ロボット通じ学生の挑戦促す 「ヒト型ロボット」研究開発の意義とは
教員の振り返る東大生活:インド哲学仏教学研究室 蓑輪顕量教授(人文社会系研究科)
研究室散歩:@情報熱力学 沙川貴大准教授(工学系研究科)
青春の一冊:畑村洋太郎編著『実際の設計 機械設計の考え方と方法』 高橋宏和准教授(情報理工学系研究科)
キャンパスガイ:堀井崇史さん(理Ⅰ・2年)
※新聞の購読については、こちらのページへどうぞ。