
ロボットが歩んできた歴史や現在ロボット研究に携わる専門家の意見を交えつつ、これからのロボットの在り方を探る連載『WHO,ROBOT』。今回は遠隔操作ロボットの具体的な例として、遠隔手術支援ロボットを扱う。国境を跨いだ遠隔手術実験を成功させた光石衛教授(東大工学系研究科)に、その仕組みや実用化の現状を聞いた。
*取材はオンラインで行われました。
(取材・村松光太朗)
患者と医師の両方にとってメリット
どのような背景から遠隔手術ロボット研究に着手されたのですか
元々の研究対象は工作機械の遠隔操作技術でした。製造や研究の現場において必要な機械部品を入手するには、図面を書いて加工専門業者に外注することが一般的です。しかし、外注は時間を要しますし、何より「この穴が想定より少し小さいので広げたい」という類いの修正要求が付きものです。そのような際に研究者や製造者が自ら直感的に工作機械を遠隔からでも扱えるシステムがあれば良いと考え、80年代からのインターネットの普及を追い風に研究を進めました。
そこから医学方面にかじを切った理由はいろいろありますが、一つは整形外科医の同級生から外科手術の難しさを聞いたことです。例えば切断してしまった指を手術で再接合するためには、切断後数時間以内に細かな血管や神経をつなげなければなりません。時間制限、要求される精度、さらに医師へのプレッシャーや肉体的疲労は過酷なものであり、ここに遠隔操作技術が介入する余地は大いにあると考えました。これにより患者もより良い医療を受けることができます。
当時は医学と工学の連携が現在ほど進んでいなかったそうですね
はい。それまで私は機械工学の中で生産工学を扱う研究室に所属していましたし、私もその分野の一端を担っていたわけです。そんな専門外の人間が医療に関わって良いのか、と感じ恐る恐る研究を始めました。
しかし、外科手術と加工は似ています。骨を部分的に削る作業には切削工学の知識や技術を用いることができますし、顕微鏡でないと見えないレベルの精密加工技術を応用して生体の微細構造に施術することも可能です。こうした生産加工分野の知見が強みとなり、先生方の後押しもあって研究を推進しました。最初に成功した遠隔ロボットによる微細血管縫合実験は医学系の先生方からも大きな反響がありましたし、この研究が医工連携の加速につながったのかもしれません。
具体的にどのような技術なのでしょうか
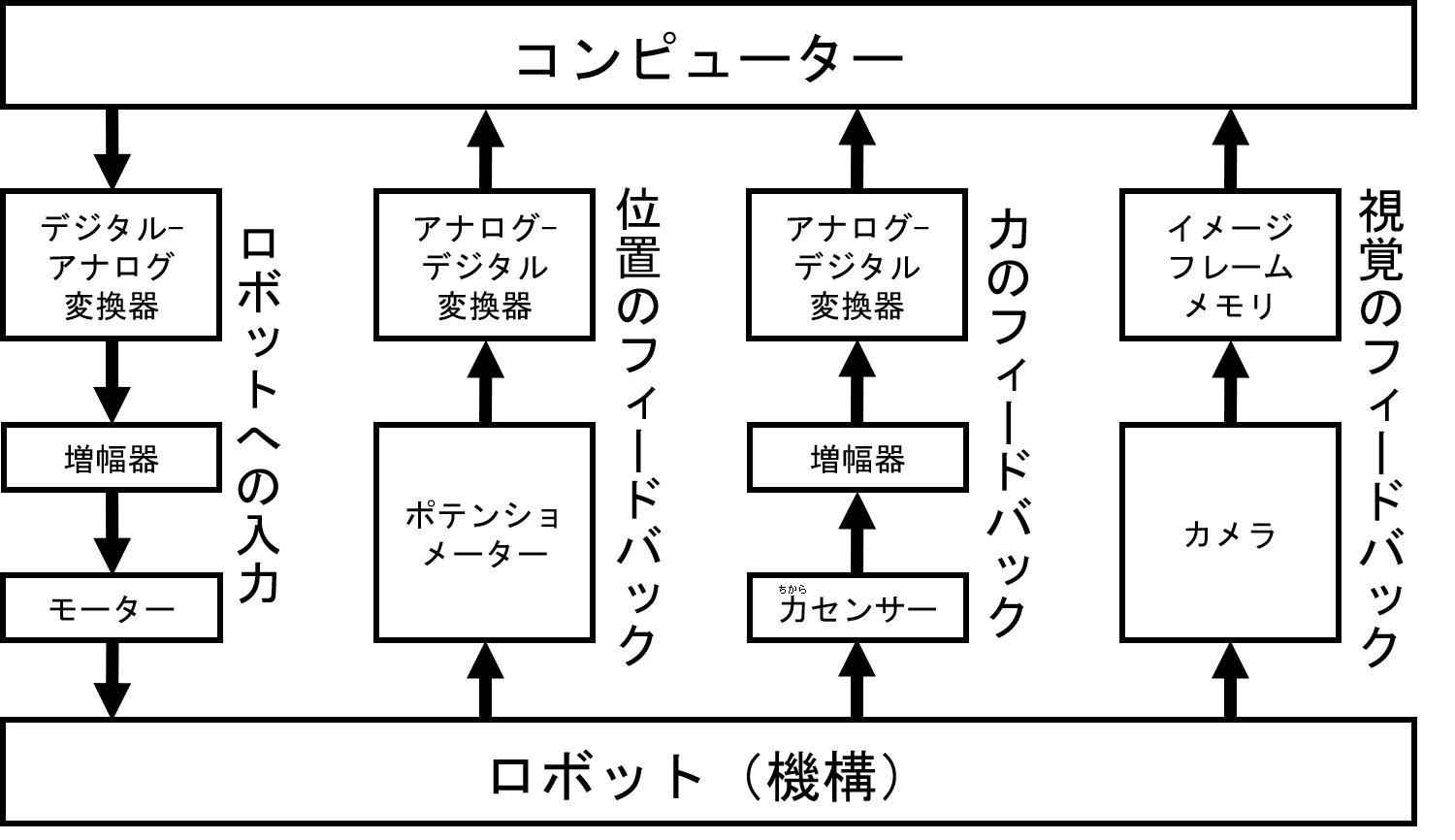
腹腔鏡下手術(小さな穴から内視鏡や手術器具を入れ、腹部の中で行う手術)の支援システムを例に説明しましょう(図1)。ハードとしてマスターマニピュレーター(①)とスレーブマニピュレーター(②)が存在します。①も②も右手と左手に対応する一対の器具となっており、①を術者が動かすと、左右それぞれの動作がセンサーで読み取られ②に送信されます。②は送られてきた情報を基に術者の動作を再現します。術者はリアルタイムで送られる患部の映像(③)を見ながら①を動かすことで、②を介し患者に施術できるのです。(図2)はこの一連の計測と制御の機構です。
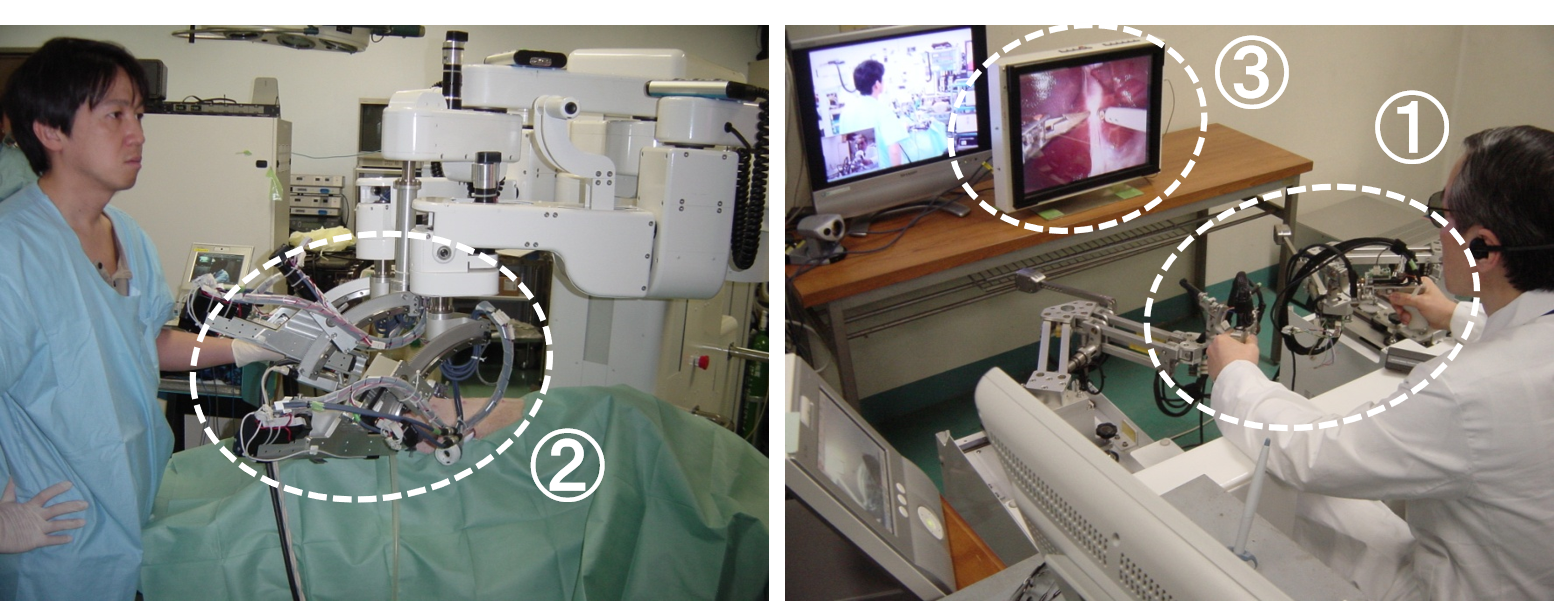
(図1)の各マニピュレーター①、②がロボットの機構に当たり、コンピューターを介して互いに通信する
(光石教授提供の資料を基に東京大学新聞社が作成)
腹腔鏡下手術は開腹部を小さくするため患者への負担も小さく、入院期間短縮などのメリットがあります。しかし、体腔内の狭い空間に制限された作業となり、簡単ではありません。そこでこのシステムをうまく用いれば、人間の手や腕よりもはるかに小さいマニピュレーターで手術することができ、手術難易度を大幅に下げることができます。加えて、術者の動作に対してスレーブマニピュレーター側の動きを小さくするように制御すれば、1ミリメートル未満の微細なレベルでの手術も可能となります。遠隔化に加えて、これだけのメリットがあるのです。
感染症流行下でも有用
本連載で前回扱ったテレイグジスタンスと基本的な仕組みは似ている印象を受けますが、テレイグジスタンスの一種だと言うことはできますか
(図3)の3要素を遠隔手術ロボットが全て満たすべきか否かという話に落ち着くかと思いますが、①と②は当然必要でしょう。
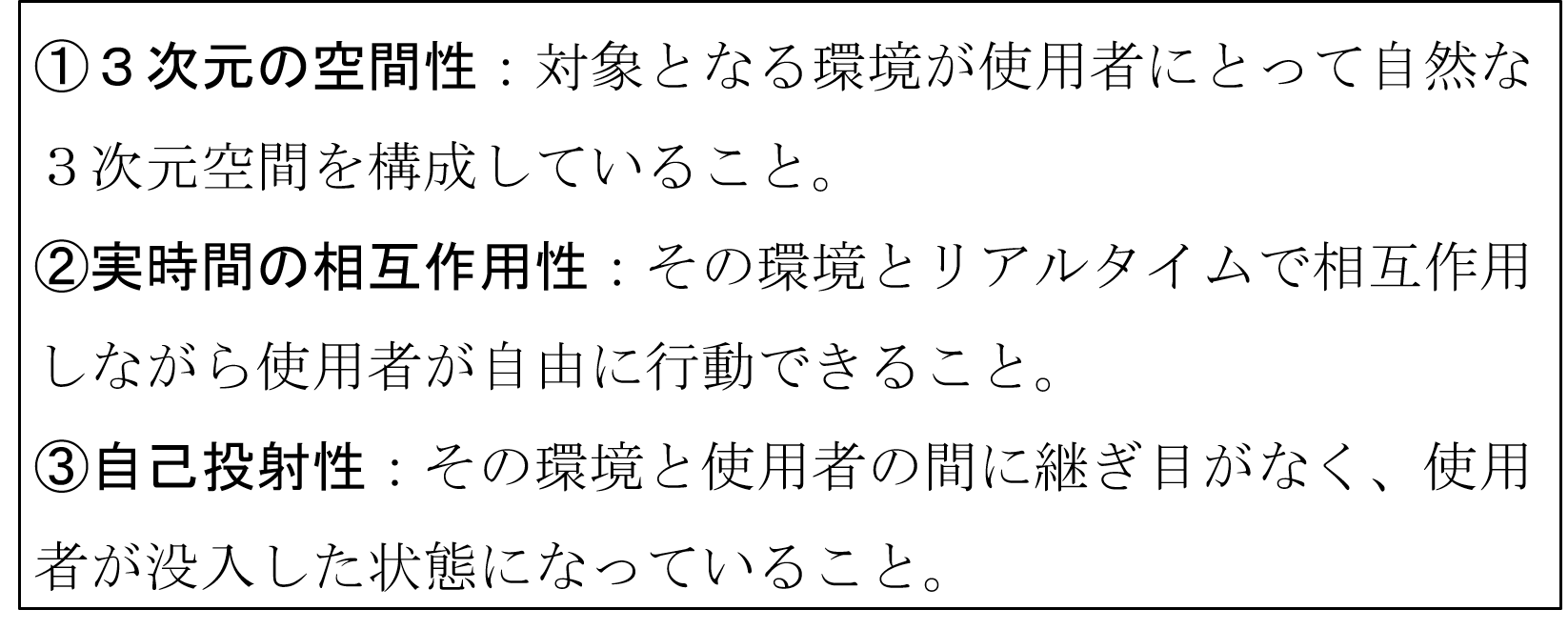
では、③はどうか。医師は実際の患者の状態を見ながら手術する必要がありますので、没入感の程度について議論の余地があります。遠隔手術ロボットの使用時に術者が欲しいのは、患部の映像(視覚)と力のフィードバック(触覚)です。特に触覚は安全性の向上には重要で、例えば少し器具を動かしたときに押し返される感覚があることで「行き過ぎた」という判断が容易にできます。術者の手術経験はそうした触覚体験の積み重ねに基づいているはずであり、仮に機械の腕を介して施術するのであれば、その腕があたかも自分の腕だと感じられるレベルで触覚を再現してほしい、となるでしょう。
映像は適当なディスプレーで映し出せますが、触覚はスレーブ側のセンサー情報を基にマスター側で人為的に作らなければなりません。既に製品化されている手術ロボットでそれを実装しているものはほとんどなく、まさにテレイグジスタンスやVR、触覚系の研究者と共同して解決しなければならない問題です。
実用化は現状どの程度進んでいるのでしょうか
(図4)や(図5)のような手術方法別の支援システム研究がだいぶ進んでおり、扱える領域は広がっています。しかし、全般的に見て技術が完成しているというわけではなく、まだまだ開発途上です。


遠隔操作の技術的課題の一つとして、時間遅れがあります。一般にある操作を行ったときに、その操作結果の反映が300㍉秒以上遅れると操作性が大きく低下すると言われており、遅延解消にはマスター・スレーブ間通信の大容量高速化が鍵となります。近年通信技術はかなり改善されていますが、将来的に宇宙空間やそこを介して遠隔手術が行われる時代が来た場合に所定の性能を発揮できるかは注目どころですね。
ハードやソフトの課題とは別に、医療製品特有の問題として公的な「認可」のハードルがあります。システムの安全性や効果などを示す必要があり、多くの実験・実例からエビデンスを示すことが求められます。
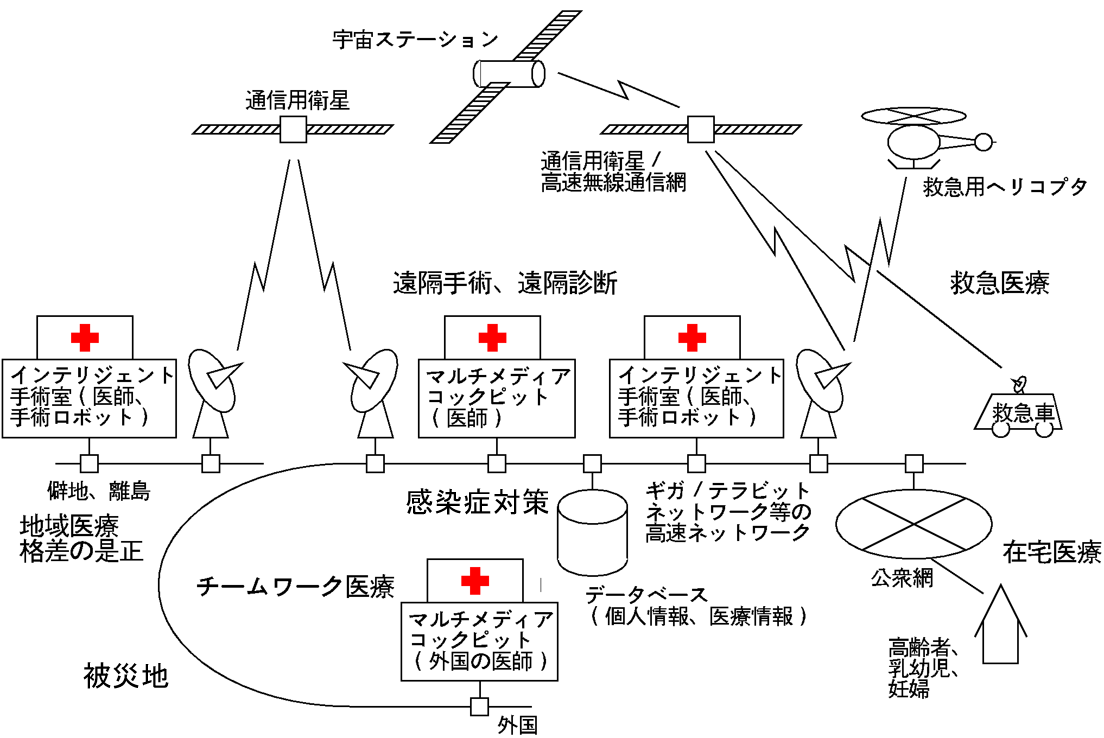
克服しなければならない課題は山積みです。しかし医師の負担軽減のみならず、医師が足りない地方への施術提供が可能となること、救急医療に対応しやすくなること、コロナ禍のような感染症の危機下でも濃密な接触を避けて施術できることなど遠隔化のメリットはたくさんあり、医療現場からも実用化が熱望されています(図6)。医工のさらなる連携を図り、多くの医療現場に普及し得る安価な遠隔手術ロボットの開発にまい進したいと思います。
(図は光石教授より提供)
(東京大学工学系研究科)
86年東京大学工学系研究科博士課程修了。工学博士。同助教授(当時)などを経て、99年より現職。
【連載:WHO, ROBOT】
- ロボットと人の役割分担明確に ~東大教授と迫る「ロボット工学三原則」~
- ロボットのコミュニケーションとビジネス戦略に迫る
- ロボット通じ学生の挑戦促す「ヒト型ロボット」研究開発の意義とは
- 新しい身体が広げる可能性~テレイグジスタンスって?~
- 遠隔化の波は診療を超えて手術まで~ロボット工学と医学の融合~ <- 本記事
この記事は2020年7月21日号から転載したものです。本紙では他にもオリジナルの記事を掲載しています。
ニュース:進学選択志望集計 育、2年で約4割減少 文Ⅰ→法は過去最低更新
ニュース:新型コロナ 国産2剤併用で有効性示唆
ニュース:秋季卒業・入学式 代表者のみで開催
ニュース:学内活動再開指針 秋からの授業はオンライン併用
企画:2021年度進学選択 第1段階志望集計表
企画:WHO,ROBOT第5回 遠隔化の波は診療を超えて手術まで ロボット工学と医学の融合
企画:専門知識を大学で深める 高専→東大という選択肢
研究室散歩@社会心理学 唐沢かおり教授(東京大学人文社会系研究科)
ひとこまの世界 お家で筋トレ
キャンパスのひと 原雅貴さん(養・3年)
※新聞の購読については、こちらのページへどうぞ。